LeetCode Entry
2290. Minimum Obstacle Removal to Reach Corner
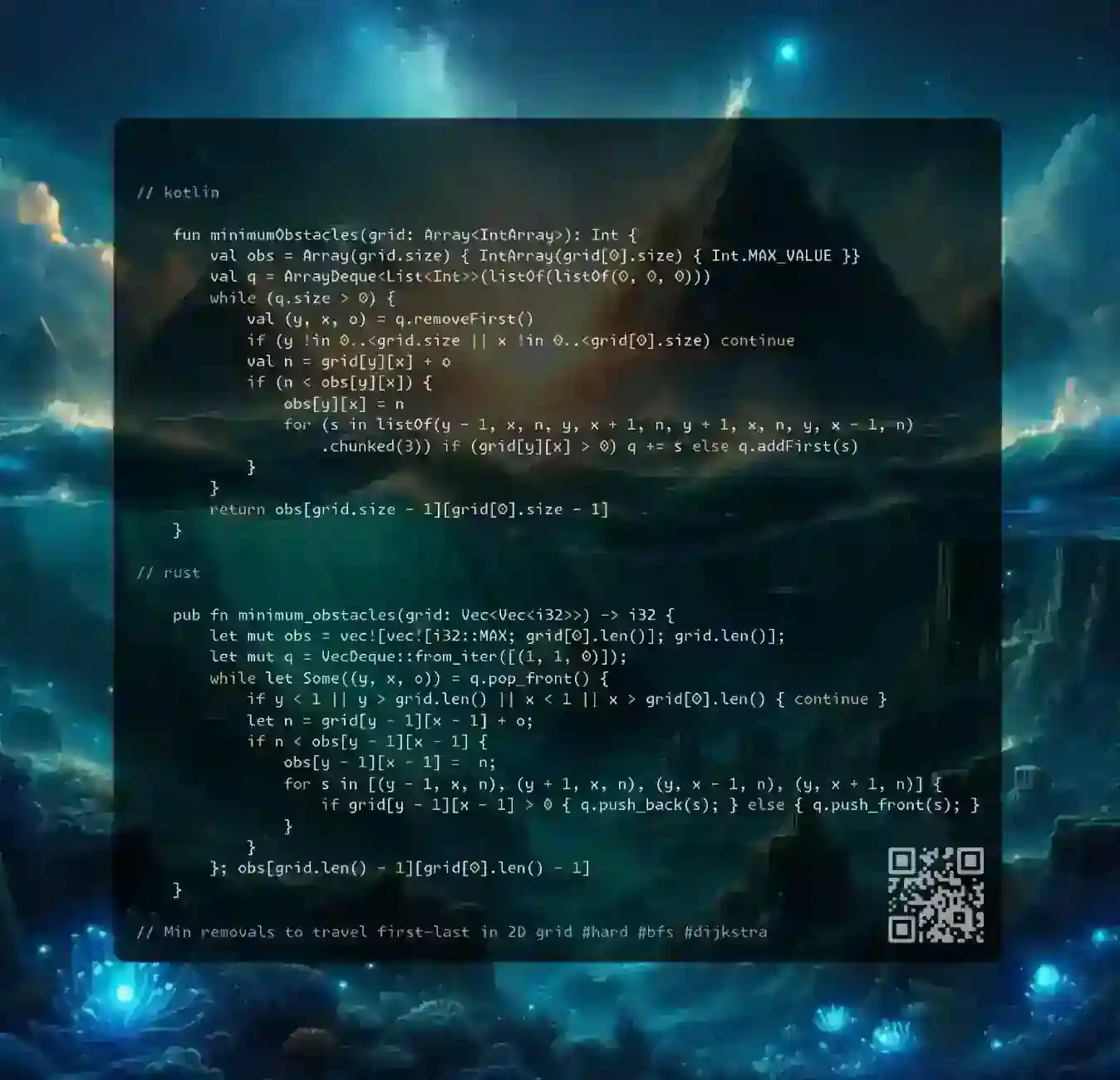
Min removals to travel first-last in 2D grid
2290. Minimum Obstacle Removal to Reach Corner hard
blog post
substack
youtube
deep-dive
Join me on Telegram
https://t.me/leetcode_daily_unstoppable/814
Problem TLDR
Min removals to travel first-last in 2D grid #hard #bfs #dijkstra
Intuition
We are interested in the shortest path through obstacles, so the go-to algorithm is the BFS, then we optimize it with Dijkstra by moving only improved paths.
This simple optimization is not enough, however. So, we have another one - use a PriorityQueue to peek the smallest obstacles paths first.
And another cool trick: the are only two types of paths to sort - completely free and ones with obstacles. Free paths must go first. We completely drop the PriorityQueue and just add to the front or to the back. (this is a 0-1 BFS https://codeforces.com/blog/entry/22276)
Approach
- some other small optimizations are possible: we can stop searching at the first arrival to the end
- we can use a two Queues instead of one
Complexity
-
Time complexity: \(O(nm)\)
-
Space complexity: \(O(nm)\)
Code
fun minimumObstacles(grid: Array<IntArray>): Int {
val obs = Array(grid.size) { IntArray(grid[0].size) { Int.MAX_VALUE }}
val q = ArrayDeque<List<Int>>(listOf(listOf(0, 0, 0)))
while (q.size > 0) {
val (y, x, o) = q.removeFirst()
if (y !in 0..<grid.size || x !in 0..<grid[0].size) continue
val n = grid[y][x] + o
if (n < obs[y][x]) {
obs[y][x] = n
for (s in listOf(y - 1, x, n, y, x + 1, n, y + 1, x, n, y, x - 1, n)
.chunked(3)) if (grid[y][x] > 0) q += s else q.addFirst(s)
}
}
return obs[grid.size - 1][grid[0].size - 1]
}
pub fn minimum_obstacles(grid: Vec<Vec<i32>>) -> i32 {
let mut obs = vec![vec![i32::MAX; grid[0].len()]; grid.len()];
let mut q = VecDeque::from_iter([(1, 1, 0)]);
while let Some((y, x, o)) = q.pop_front() {
if y < 1 || y > grid.len() || x < 1 || x > grid[0].len() { continue }
let n = grid[y - 1][x - 1] + o;
if n < obs[y - 1][x - 1] {
obs[y - 1][x - 1] = n;
for s in [(y - 1, x, n), (y + 1, x, n), (y, x - 1, n), (y, x + 1, n)] {
if grid[y - 1][x - 1] > 0 { q.push_back(s); } else { q.push_front(s); }
}
}
}; obs[grid.len() - 1][grid[0].len() - 1]
}
int minimumObstacles(vector<vector<int>>& g) {
int m = g.size(), n = g[0].size();
vector<vector<int>> obs(m, vector<int>(n, INT_MAX));
deque<tuple<int, int, int>> q; q.emplace_back(0, 0, 0);
vector<pair<int, int>>dxy..-1, 0}, {0, 1}, {1, 0}, {0, -1..; // replace . to {
while (q.size()) {
auto [y, x, o] = q.front(); q.pop_front();
for (auto [dy, dx]: dxy) {
int ny = y + dy, nx = x + dx;
if (ny < 0 || ny >= m || nx < 0 || nx >= n || g[ny][nx] + o >= obs[ny][nx]) continue;
int n = g[ny][nx] + o; obs[ny][nx] = n;
if (g[ny][nx] > 0) q.emplace_back(ny, nx, n); else q.emplace_front(ny, nx, n);
}
} return obs[m - 1][n - 1];
}
Comments