LeetCode Entry
3651. Minimum Cost Path with Teleportations
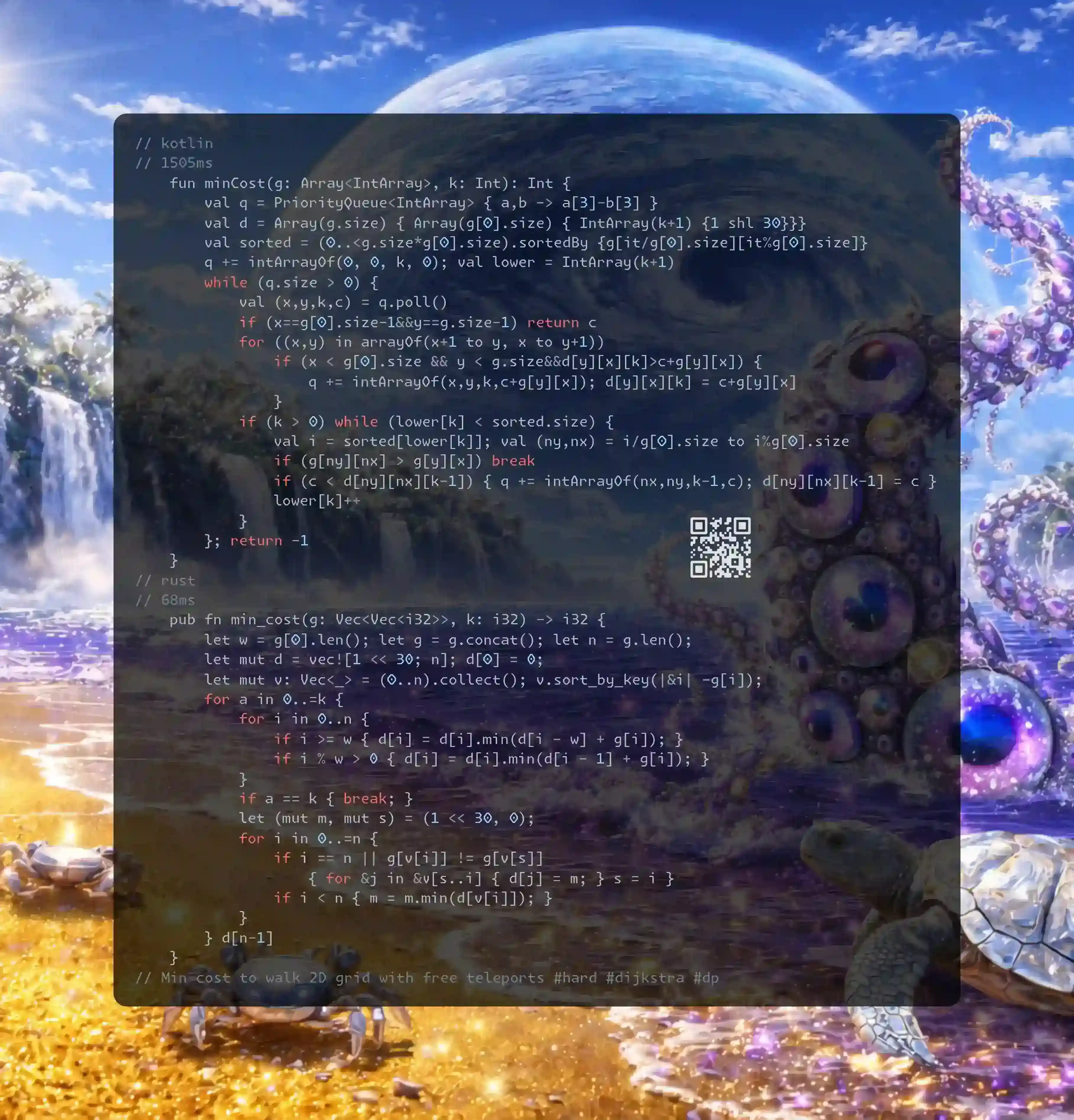
Min cost to walk 2D grid with free teleports
3651. Minimum Cost Path with Teleportations hard blog post substack youtube
Join me on Telegram
https://t.me/leetcode_daily_unstoppable/1251
Problem TLDR
Min cost to walk 2D grid with free teleports #hard #dijkstra #dp
Intuition
Didn’t solved.
// BFS?
// A*
// Dijkstra
//
// store individual k for each path
//
// moves only right-down,
// can teleport backwards for some optimal paths
//
// we have to try all possible paths
//
// visited set is x,y,k
//
// to teleport we have to try all "lower" values
//
// 80*80=1600 or 10^3 can be O(n) scan for lowers?
//
// DP=DFS+cache? - no, we can visit twice with better value, so should be Dijkstra
//
// TLE
//
// TLE TLE TLE
// TLE
To make Dijkstra work skip already done teleportations for each lower[k], where lower is indices of all sorted values.
The dp solution: do k layered relaxations of teleportations and walks right-bottom.
Approach
- why in Dijkstra we can skip teleportations individually for each k?
- why in Dp solution we updating by batches of equal values the minimum value so far?
- why in Dp solution we sort descending and going from bigger to lower value and updating min(dp)?
Complexity
-
Time complexity: \(O(n^2klog(n))\) for Dijkstra and n^2k for DP
-
Space complexity: \(O(n^2k)\) for Dijkstra, n^2 for dp
Code
// 1505ms
fun minCost(g: Array<IntArray>, k: Int): Int {
val q = PriorityQueue<IntArray> { a,b -> a[3]-b[3] }
val d = Array(g.size) { Array(g[0].size) { IntArray(k+1) {1 shl 30}}}
val sorted = (0..<g.size*g[0].size).sortedBy {g[it/g[0].size][it%g[0].size]}
q += intArrayOf(0, 0, k, 0); val lower = IntArray(k+1)
while (q.size > 0) {
val (x,y,k,c) = q.poll()
if (x==g[0].size-1&&y==g.size-1) return c
for ((x,y) in arrayOf(x+1 to y, x to y+1))
if (x < g[0].size && y < g.size&&d[y][x][k]>c+g[y][x]) {
q += intArrayOf(x,y,k,c+g[y][x]); d[y][x][k] = c+g[y][x]
}
if (k > 0) while (lower[k] < sorted.size) {
val i = sorted[lower[k]]; val (ny,nx) = i/g[0].size to i%g[0].size
if (g[ny][nx] > g[y][x]) break
if (c < d[ny][nx][k-1]) { q += intArrayOf(nx,ny,k-1,c); d[ny][nx][k-1] = c }
lower[k]++
}
}; return -1
}
// 68ms
pub fn min_cost(g: Vec<Vec<i32>>, k: i32) -> i32 {
let w = g[0].len(); let g = g.concat(); let n = g.len();
let mut d = vec![1 << 30; n]; d[0] = 0;
let mut v: Vec<_> = (0..n).collect(); v.sort_by_key(|&i| -g[i]);
for a in 0..=k {
for i in 0..n {
if i >= w { d[i] = d[i].min(d[i - w] + g[i]); }
if i % w > 0 { d[i] = d[i].min(d[i - 1] + g[i]); }
}
if a == k { break; }
let (mut m, mut s) = (1 << 30, 0);
for i in 0..=n {
if i == n || g[v[i]] != g[v[s]]
{ for &j in &v[s..i] { d[j] = m; } s = i }
if i < n { m = m.min(d[v[i]]); }
}
} d[n-1]
}
Comments